Overview
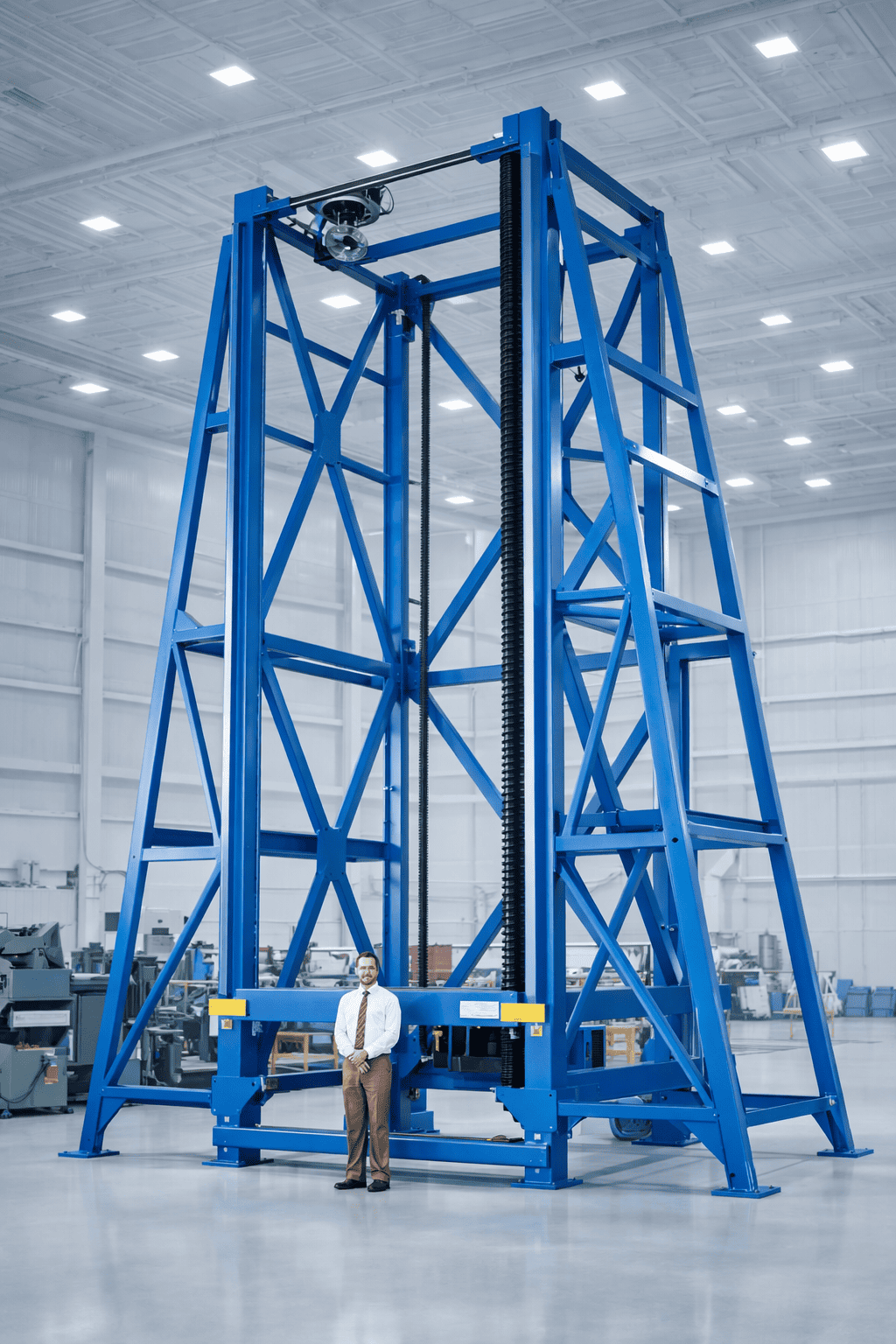
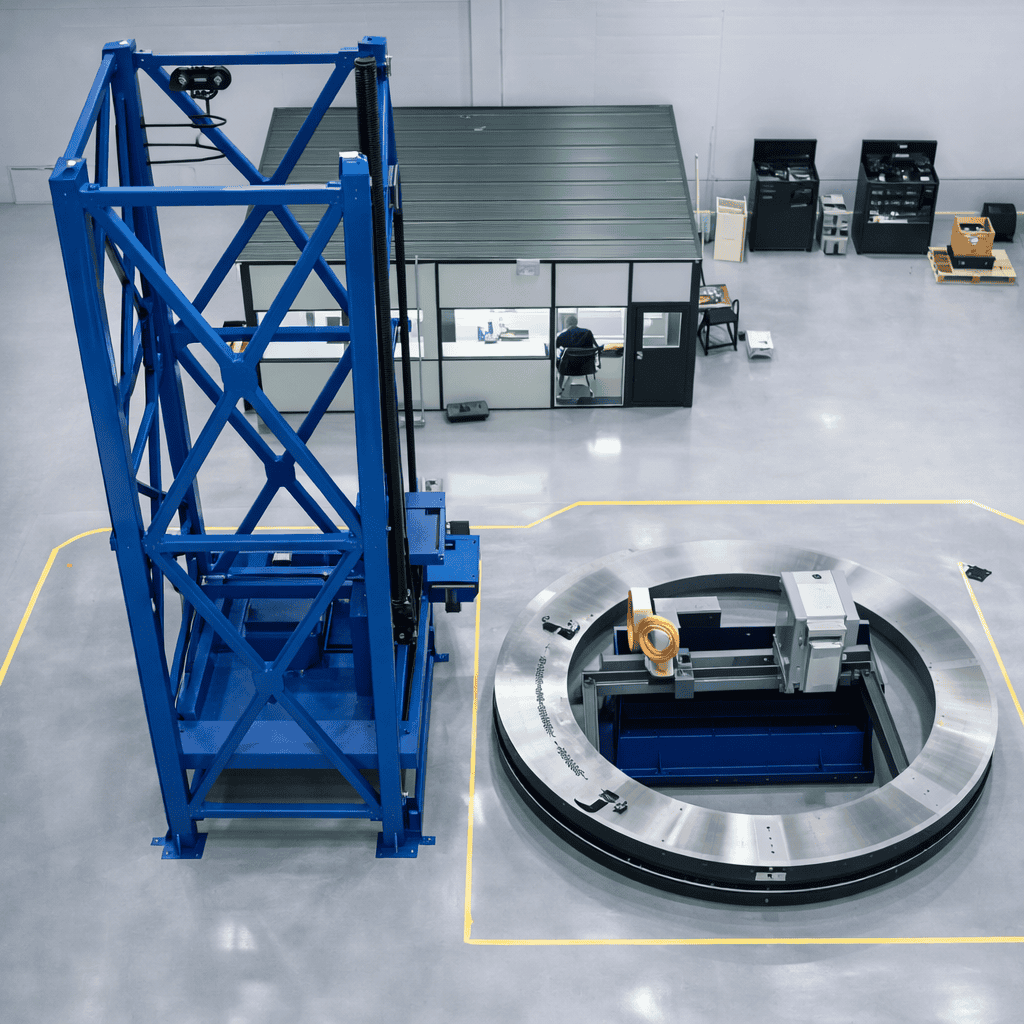
A major aerospace and defence integration firm approached Handling Specialty to custom engineer and manufacture an automated ultrasonic inspection system to inspect the exterior surface of a rocket shell using a robot. The lifts/robotic units work in tandem: one robot repeatedly raises and lowers inside the rocket shell on the scissor lift while the other matches this movement on the outside via the four-post lift.
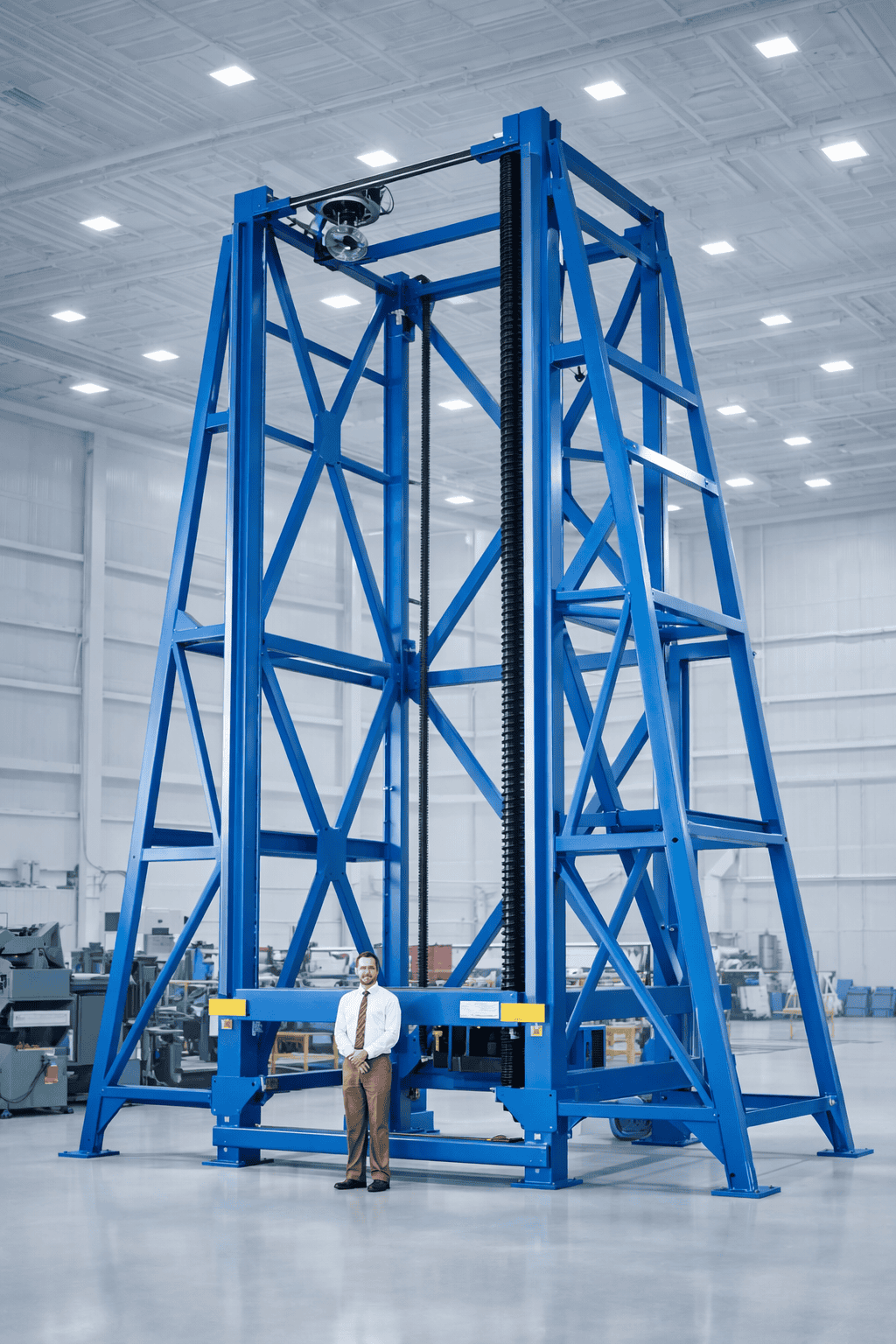
Stability and precision of motion are critical to the accurate inspection of the rocket shell. Handling Specialty’s four-post, ball screw-actuated lift platform has a vertical repeatability of ±0.010”. It also has zero left-to-right sway and creep in any position. Linear bearings on the front section of the lift ensure position accuracy. Smooth acceleration and deceleration of the platform are achieved through the use of a servo motor.
To match the four-post lift, the multi-stage scissor lift must also move precisely. To achieve this, the lift incorporates an innovative self-extending mechanical actuator and a servo motor for smooth acceleration and deceleration of the platform. The result is a vertical repeatability of ±0.010” and a left-to-right sway in the raised position of ±0.010°. Since hydraulic fluid could not be used in this system, the lift incorporates stainless steel anti-collapsed cylinders utilizing distilled water as the fluid medium.
Features
- Lift 1: 1,200 lb. capacity, mechanical actuation, 60” L x 120” W, 240” vertical travel.
- Lift 2: 3,500 lb. capacity, mechanical actuation, 120” L x 124.5” W 276” vertical travel.
- Servo motor drive for smooth acceleration and deceleration.
- Vertical repeatability of ± 0.010.”
- Machined surfaces on platforms for the robotic interface.